Using a 3D Virtual Environment to Reduce Downtime
Using IoT-based technology to connect robots, controllers and other real hardware to a 3D virtual environment, FASTSUITE simulation from CENIT debugs robot motion faster than ever – before downloading to actual equipment – increasing precision and efficiency to slash downtime on the shop floor
Posted: July 26, 2019
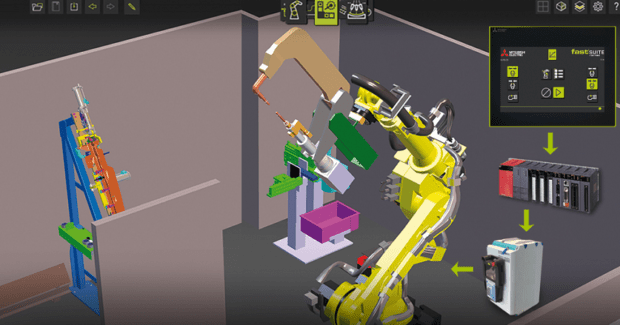
To significantly reduce automation equipment installation cost and startup time, the latest version of the FASTSUITE Edition 2 3D simulation platform from CENIT North America, Inc. (Auburn Hills, MI) simulates and validates based on real controller technology to meet the highest demands for simulation accuracy and robotics offline programming. For example, a full mechatronics model of a spot weld automation cell can be connected live with a FANUC robot controller and a programmable logic controller from Mitsubishi, with both the controller hardware and software in the simulation loop. This allows debugging of the automation control logic and PLC code, as well as fine-tuning of the robot motion in a 3D virtual environment – all before downloading to real equipment – for increased precision and efficiency that slashes downtime on the shop floor.
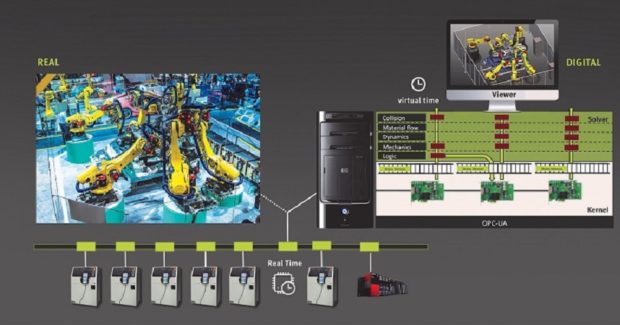
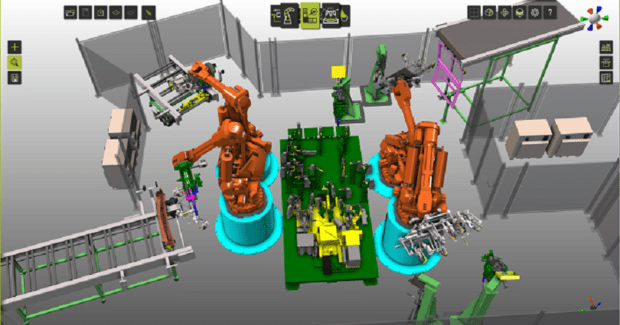
“Connecting real hardware, such as robots and controllers, to a 3D virtual environment is inevitable and plays an important role during the implementation of IoT-based technology in manufacturing facilities,” explained Helmut Ziewers, the vice president of digital factory solutions at CENIT North America. “Ever increasing complexity, combined with ever decreasing timing for the implementation or retrofitting of production lines, make the use of IoT-based technology an absolute must. FASTSUITE Edition 2 is designed to meet all requirements related to IoT through the ability to connect real controllers with our 3D simulation platform, whether logic or motion, an important step towards the final solution.” Other enhancements in offline programming are specifically for arc and laser welding and other body-in-white applications. For example, complex setups – such as coordinating the simultaneous motion of multiple robots with a workpiece positioner – can now be easily programmed and accurately simulated for several robot brands. For better seam quality in arc welding, algorithms have been added to automate horizontal welding when using robots in conjunction with controlled workpiece positioners.
CENIT North America, Inc., 691 North Squirrel Road, #275, Auburn Hills, MI 48326, 248-309-3251, l.dochia@cenit.com, www.fastsuite.com.
Subscribe to learn the latest in manufacturing.



